Программное обеспечение T-FLEX Динамика
| Вендор: | ЗАО «Топ Системы» |
| Область применения: | Машиностроение и производство |
| Официальный сайт: | www.tflex.ru |
Постарайтесь заполнить все поля формы, чем больше информации вы нам предоставите, тем более точный ответ вы получите.
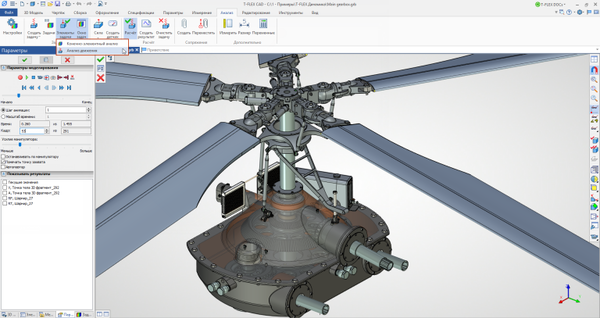
Модель механизма описывается как система твердых тел, шарниров и нагрузок, создаваемая на основе трехмерной геометрической модели T-FLEX CAD и сопряжений. Решатель программы учитывает масс-инерционные характеристики тел трехмерной модели. Для описания системы, решаемой в модуле T-FLEX Динамика, используется специальный объект модели — задача «Анализ движения». Он содержит в себе набор элементов модели, нагрузок и других элементов, задающих их взаимодействие. В задаче содержатся данные, задающие направление силы тяжести, свойства элементов задачи по умолчанию (свойства шарниров, силы трения, контактные свойства), временные характеристики моделируемого процесса. Задач может быть несколько. Каждая из них может содержать свой набор элементов и граничных условий для нахождения решения в различных постановках или при различных нагрузках. Задача ассоциативно связана с трехмерной моделью. При изменении параметров или состава модели автоматически происходят соответствующие изменения и в задаче.

Для задания связей между трехмерными телами используются сопряжения и степени свободы. На их основе система формирует список шарниров, которые характеризуются геометрическими параметрами (размерами), коэффициентами трения.
В качестве нагрузок для тел можно задать начальные линейные и угловые скорости, силы, моменты, пружины, гравитацию
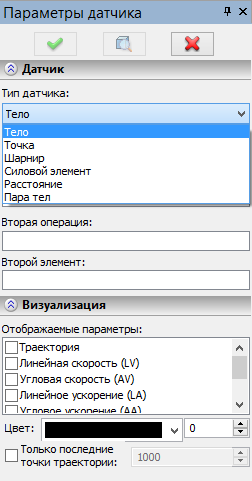
Для исследования результатов в системе используются специальные элементы — «датчики». Датчик может измерять физические величины в конкретной точке модели, в центре тяжести тела. В системе также имеется возможность использовать датчик, измеряющий относительное положение или относительную скорость любых точек модели. Датчик может измерять также координаты, линейные и угловые скорости, ускорения, силы реакций в шарнирах, усилия в пружинах
В случае необходимости при расчете задачи датчик может отображать измеряемые параметры в графическом виде (в виде векторов). Это позволяет пользователю наглядно представить процессы, происходящие при анализе движения.
При расчете задачи система может учитывать контакты между твердыми телами по заданному списку. Для наиболее естественного моделирования механических систем пользователь имеет возможность задать контактные свойства материалов: коэффициенты трения, коэффициенты восстановления, задающие поведение тел при ударе (отскок)
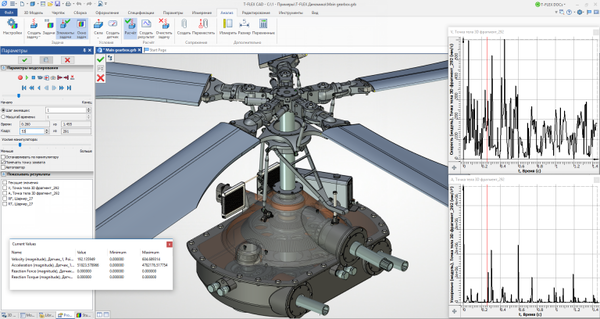
Численные результаты могут быть представлены в виде графиков, которые пользователь может построить для снятия показаний датчиков. Графики показывают зависимость измеряемых величин от времени. Их можно просматривать в специальных окнах в процессе расчета или после расчета, выбрав команду Графики. Предусмотрена возможность экспортировать рассчитанные данные в другие системы.
В процессе расчета пользователь может наблюдать за поведением модели с любой точки. Результаты анализа сохраняются в рассчитанной модели и могут быть проиграны системой в любой момент времени без необходимости расчета. По готовым результатам можно создавать анимационные ролики в формате AVI с требуемой частотой кадров и заданным масштабом времени.
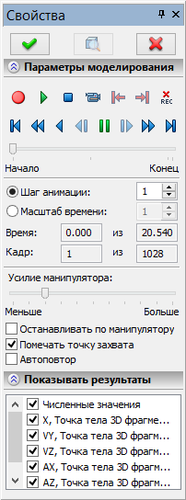
Команда Расчет производит расчет модели по кадрам с одновременным выводом на экран результатов, которыми являются положение элементов модели на экране, векторы и траектории, отображаемые датчиками, изображения графиков. Команда позволяет приостанавливать и возобновлять расчет, проигрывать рассчитанную последовательность на экране, выполнять покадровый просмотр, удалять часть рассчитанных данных и др. Уникальным инструментом в этой команде является возможность интерактивного воздействия пользователя на процесс расчета при помощи манипулятора.
Минимальные требования:
- Windows 7×64 (с Пакетом обновлений 1).
- Intel или AMD с поддержкой SSE3.
- 2 Гб ОЗУ.
- 3 Гб ПЗУ.
- Видеокарта с поддержкой OpenGL 3.3 и выше.